

Generalized Linear Quadratic Control for a Full Tracking Problem in Aviation
- PMID: 32456081
- PMCID: PMC7285372
- DOI: 10.3390/s20102955
Generalized Linear Quadratic Control for a Full Tracking Problem in Aviation
Abstract
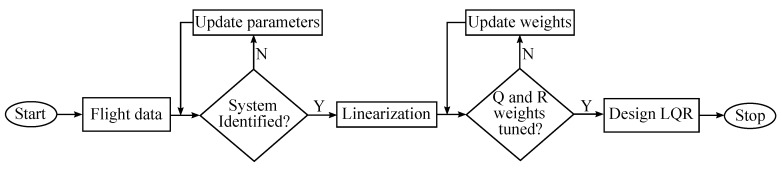
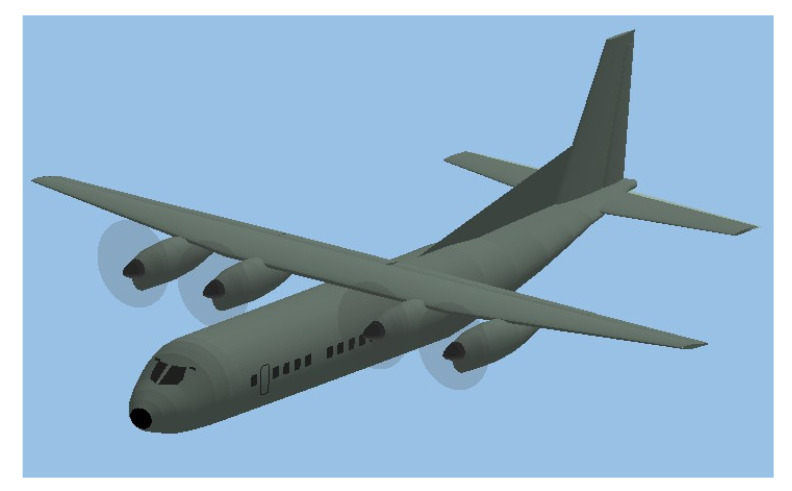
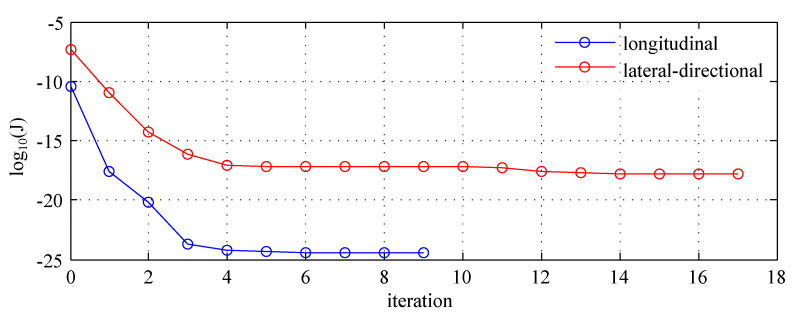
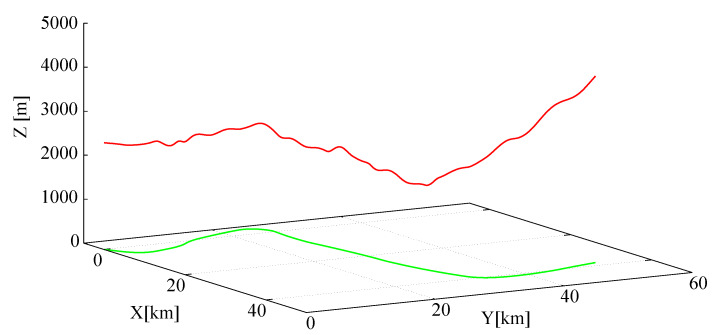
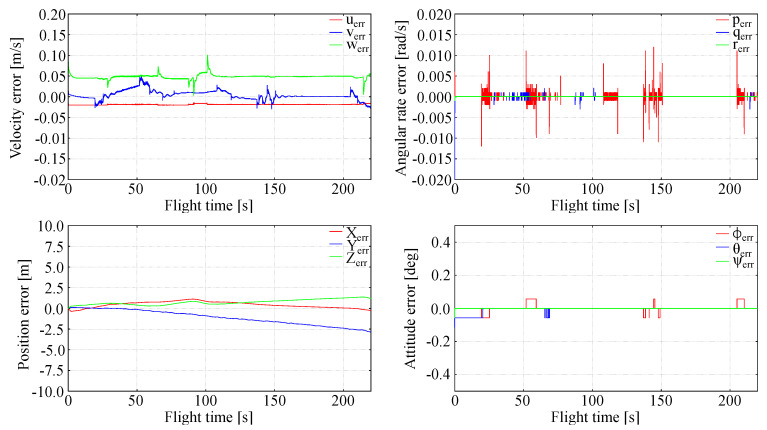
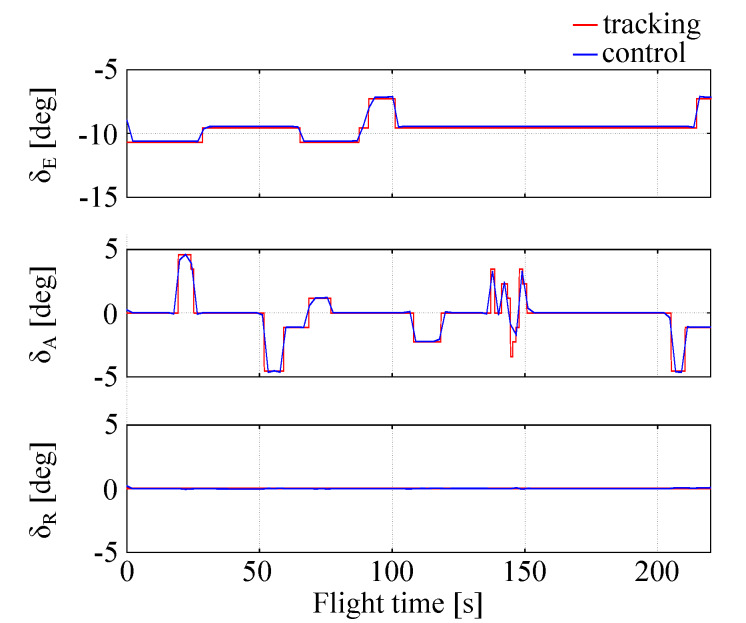
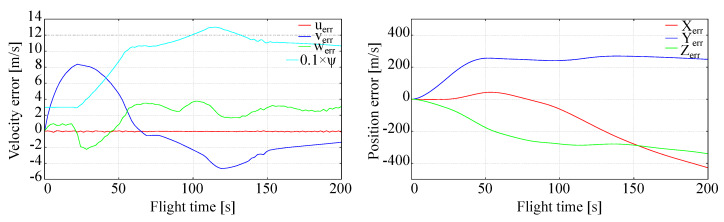
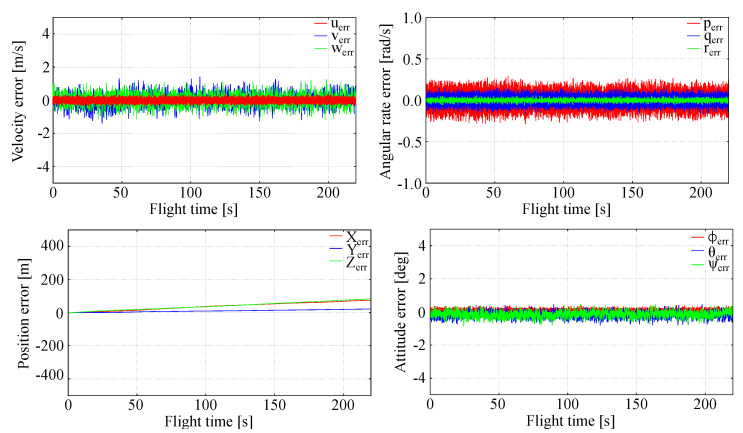
In this paper, the full tracking problem in aircraft system identification and control is presented. Time domain output error method with maximum likelihood principle was used to perform system identification. The linear quadratic regulator (LQR)-based approach has been used for solving aviation full tracking problems in aviation. It has been shown that the generalized nonlinear LQR control is able to handle such problems even in case of inaccurate measurements and in the presence of moderate disturbances provided that the model of an aircraft is properly identified.
Keywords: LQR; aviation; control; system identification; trajectory tracking.
Conflict of interest statement
The authors declare no conflict of interest.
Figures

Similar articles
-
Simulation Analysis of Linear Quadratic Regulator Control of Sagittal-Plane Human Walking-Implications for Exoskeletons.J Biomech Eng. 2017 Oct 1;139(10). doi: 10.1115/1.4037560. J Biomech Eng. 2017. PMID: 28787476
-
Autonomous Collision Avoidance Using MPC with LQR-Based Weight Transformation.Sensors (Basel). 2021 Jun 23;21(13):4296. doi: 10.3390/s21134296. Sensors (Basel). 2021. PMID: 34201820 Free PMC article.
-
Output Feedback Q-Learning Control for the Discrete-Time Linear Quadratic Regulator Problem.IEEE Trans Neural Netw Learn Syst. 2019 May;30(5):1523-1536. doi: 10.1109/TNNLS.2018.2870075. Epub 2018 Oct 8. IEEE Trans Neural Netw Learn Syst. 2019. PMID: 30296242
-
Performance comparison of structured [Formula: see text] based looptune and LQR for a 4-DOF robotic manipulator.PLoS One. 2022 Apr 11;17(4):e0266728. doi: 10.1371/journal.pone.0266728. eCollection 2022. PLoS One. 2022. PMID: 35404940 Free PMC article.
-
The Persistent Issue of Simulator Sickness in Naval Aviation Training.Aerosp Med Hum Perform. 2018 Apr 1;89(4):396-405. doi: 10.3357/AMHP.4906.2018. Aerosp Med Hum Perform. 2018. PMID: 29562971 Review.
Cited by
-
Multi-Sensor Fusion for Underwater Vehicle Localization by Augmentation of RBF Neural Network and Error-State Kalman Filter.Sensors (Basel). 2021 Feb 6;21(4):1149. doi: 10.3390/s21041149. Sensors (Basel). 2021. PMID: 33562145 Free PMC article.
-
Smart Active Vibration Control System of a Rotary Structure Using Piezoelectric Materials.Sensors (Basel). 2022 Jul 29;22(15):5691. doi: 10.3390/s22155691. Sensors (Basel). 2022. PMID: 35957246 Free PMC article.
References
-
- Al-Hiddabi S.A., McClamroch N.H. Aggressive Longitudinal Aircraft Path Tracking Using Nonlinear Control. Asian J. Control. 2001;3:280–288. doi: 10.1111/j.1934-6093.2001.tb00068.x. - DOI
-
- Sun H., Yang Z., Zeng J. New Tracking-Control Strategy for Airbreathing Hypersonic Vehicles. J. Guid. Control. Dyn. 2013;36:846–859. doi: 10.2514/1.57739. - DOI
-
- Zhao Y., Tsiotras P. Analysis of Energy-Optimal Aircraft Landing Operation Trajectories. J. Guid. Control Dyn. 2013;36:833–845. doi: 10.2514/1.57779. - DOI
-
- Schmitt L., Fichter W. Continuous Singularity Free Approach to the Three-Dimensional Bearings-Only Tracking Problem. J. Guid. Control. Dyn. 2016;39:2673–2682. doi: 10.2514/1.G000362. - DOI
LinkOut - more resources
Full Text Sources
