

A Collaborative UAV-WSN Network for Monitoring Large Areas
- PMID: 30513655
- PMCID: PMC6308614
- DOI: 10.3390/s18124202
A Collaborative UAV-WSN Network for Monitoring Large Areas
Abstract
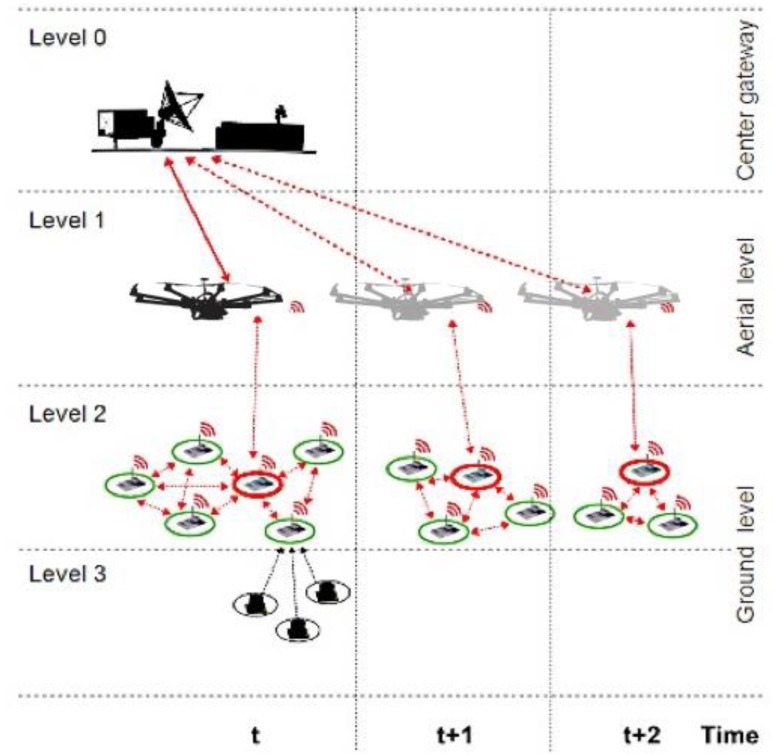
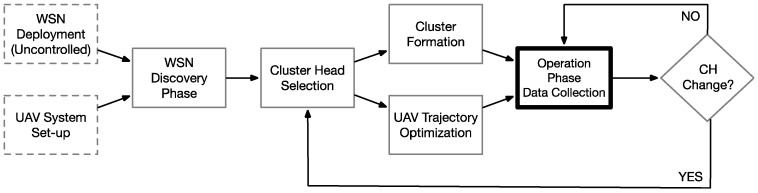
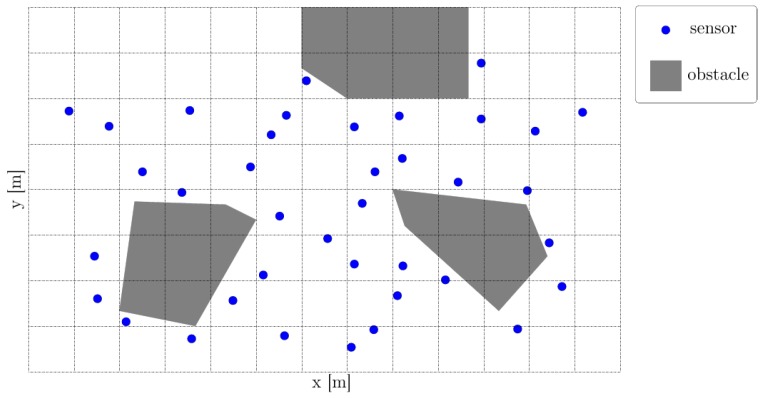
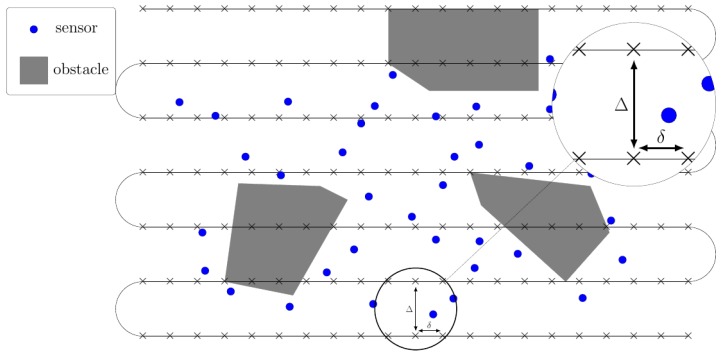
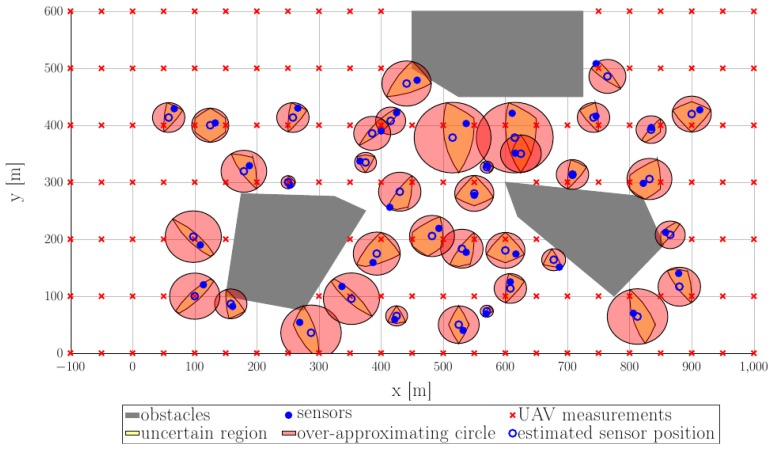
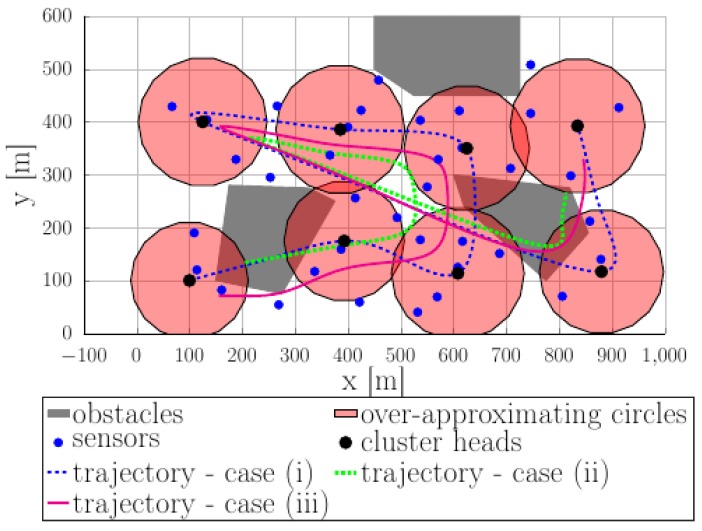
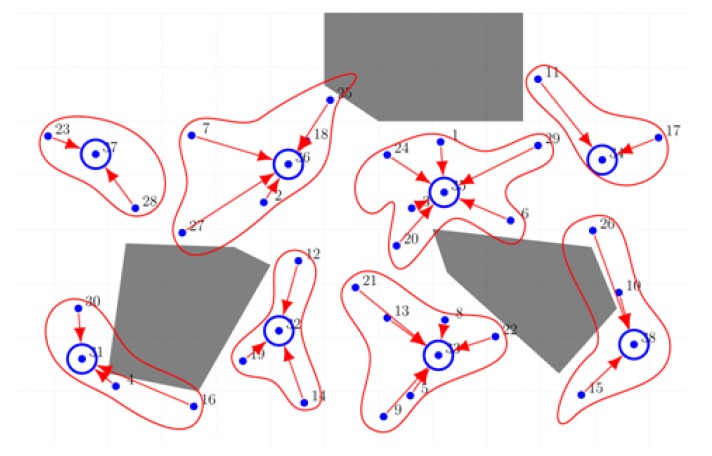
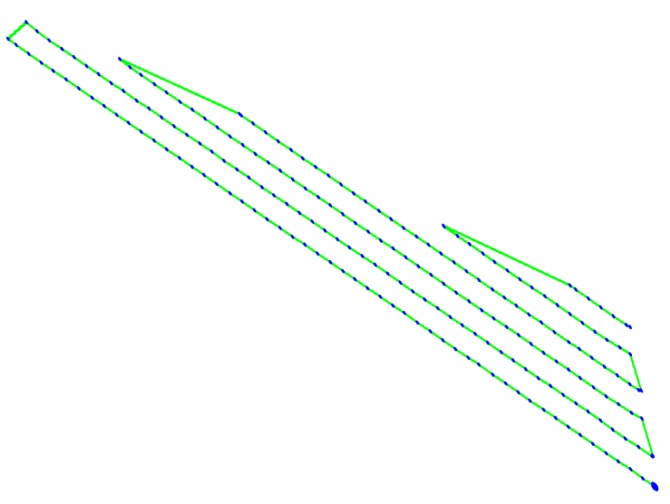
Large-scale monitoring systems have seen rapid development in recent years. Wireless sensor networks (WSN), composed of thousands of sensing, computing and communication nodes, form the backbone of such systems. Integration with unmanned aerial vehicles (UAVs) leads to increased monitoring area and to better overall performance. This paper presents a hybrid UAV-WSN network which is self-configured to improve the acquisition of environmental data across large areas. A prime objective and novelty of the heterogeneous multi-agent scheme proposed here is the optimal generation of reference trajectories, parameterized after inter- and intra-line distances. The main contribution is the trajectory design, optimized to avoid interdicted regions, to pass near predefined way-points, with guaranteed communication time, and to minimize total path length. Mixed-integer description is employed into the associated constrained optimization problem. The second novelty is the sensor localization and clustering method for optimal ground coverage taking into account the communication information between UAV and a subset of ground sensors (i.e., the cluster heads). Results show improvements in both network and data collection efficiency metrics by implementing the proposed algorithms. These are initially evaluated by means of simulation and then validated on a realistic WSN-UAV test-bed, thus bringing significant practical value.
Keywords: clustering; large area monitoring; optimal trajectory design; unmanned aerial vehicle; wireless sensor network.
Conflict of interest statement
The authors declare no conflict of interest. The founding sponsors had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, and in the decision to publish the results.
Figures

Similar articles
-
A Survey of Collaborative UAV-WSN Systems for Efficient Monitoring.Sensors (Basel). 2019 Oct 28;19(21):4690. doi: 10.3390/s19214690. Sensors (Basel). 2019. PMID: 31661937 Free PMC article. Review.
-
Analyzing the Effects of UAV Mobility Patterns on Data Collection in Wireless Sensor Networks.Sensors (Basel). 2017 Feb 20;17(2):413. doi: 10.3390/s17020413. Sensors (Basel). 2017. PMID: 28230727 Free PMC article.
-
Energy Consumption Minimization in Unmanned Aerial Vehicle-Enabled Secure Wireless Sensor Networks.Sensors (Basel). 2023 Nov 26;23(23):9411. doi: 10.3390/s23239411. Sensors (Basel). 2023. PMID: 38067784 Free PMC article.
-
Design of an Integrated Remote and Ground Sensing Monitor System for Assessing Farmland Quality.Sensors (Basel). 2020 Jan 7;20(2):336. doi: 10.3390/s20020336. Sensors (Basel). 2020. PMID: 31936040 Free PMC article.
-
Toward Integrated Large-Scale Environmental Monitoring Using WSN/UAV/Crowdsensing: A Review of Applications, Signal Processing, and Future Perspectives.Sensors (Basel). 2022 Feb 25;22(5):1824. doi: 10.3390/s22051824. Sensors (Basel). 2022. PMID: 35270970 Free PMC article. Review.
Cited by
-
Handover Management for Drones in Future Mobile Networks-A Survey.Sensors (Basel). 2022 Aug 25;22(17):6424. doi: 10.3390/s22176424. Sensors (Basel). 2022. PMID: 36080883 Free PMC article. Review.
-
AI-Based Sensor Information Fusion for Supporting Deep Supervised Learning.Sensors (Basel). 2019 Mar 18;19(6):1345. doi: 10.3390/s19061345. Sensors (Basel). 2019. PMID: 30889840 Free PMC article.
-
Noncoherent Decision Fusion over Fading Hybrid MACs in Wireless Sensor Networks.Sensors (Basel). 2019 Jan 1;19(1):120. doi: 10.3390/s19010120. Sensors (Basel). 2019. PMID: 30609667 Free PMC article.
-
Power Allocation and Energy Cooperation for UAV-Enabled MmWave Networks: A Multi-Agent Deep Reinforcement Learning Approach.Sensors (Basel). 2021 Dec 30;22(1):270. doi: 10.3390/s22010270. Sensors (Basel). 2021. PMID: 35009812 Free PMC article.
-
Hybrid Path Planning for Efficient Data Collection in UAV-Aided WSNs for Emergency Applications.Sensors (Basel). 2021 Apr 17;21(8):2839. doi: 10.3390/s21082839. Sensors (Basel). 2021. PMID: 33920627 Free PMC article.
References
-
- Francesco M., Das S., Anastasi G. Data collection in wireless sensor networks with mobile elements: A survey. ACM Trans. Sen. Netw. 2011;8:1–31. doi: 10.1145/1993042.1993049. - DOI
-
- Cao H.R., Yang Z., Yue X.J., Liu Y.X. An optimization method to improve the performance of unmanned aerial vehicle wireless sensor networks. Int. J. Distrib. Sens. Netw. 2017;13:1550147717705614. doi: 10.1177/1550147717705614. - DOI
-
- Puccinelli D., Haenggi M. Wireless sensor networks: Applications and challenges of ubiquitous sensing. IEEE Circuits Syst. Mag. 2005;5:19–31. doi: 10.1109/MCAS.2005.1507522. - DOI
-
- Zhan C., Zeng Y., Zhang R. Energy-efficient data collection in UAV enabled wireless sensor network. IEEE Wirel. Commun. Lett. 2018;7:328–331. doi: 10.1109/LWC.2017.2776922. - DOI
-
- Stoican F., Prodan I., Popescu D. Flat trajectory generation for way-points relaxations and obstacle avoidance; Proceedings of the 23th Mediterranean Conference on Control and Automation; Torremolinos, Spain. 16–19 June 2015; pp. 695–700. - DOI
LinkOut - more resources
Full Text Sources
Other Literature Sources
