

Design of a Cooperative Lane Change Protocol for a Connected and Automated Vehicle Based on an Estimation of the Communication Delay
- PMID: 30336576
- PMCID: PMC6210528
- DOI: 10.3390/s18103499
Design of a Cooperative Lane Change Protocol for a Connected and Automated Vehicle Based on an Estimation of the Communication Delay
Abstract
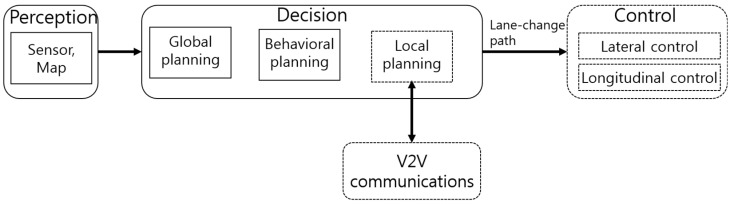
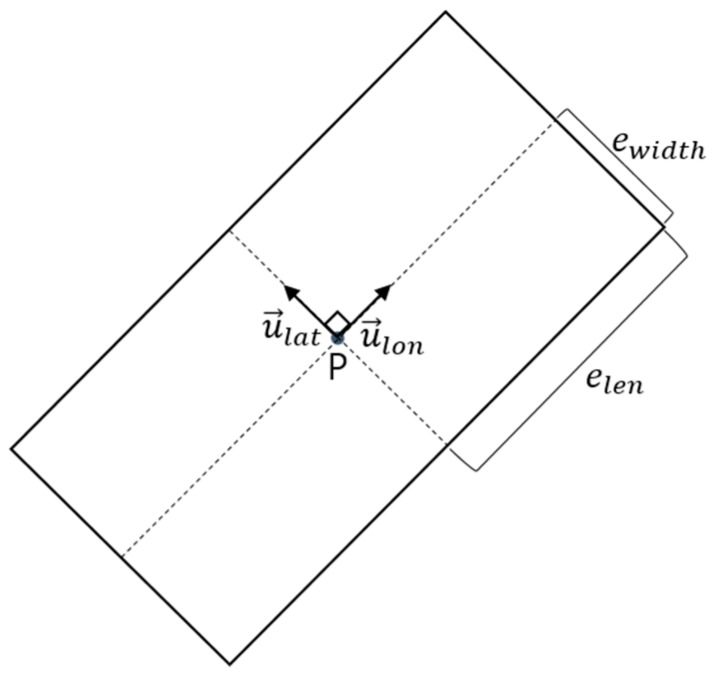
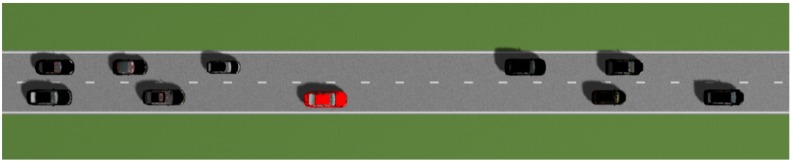
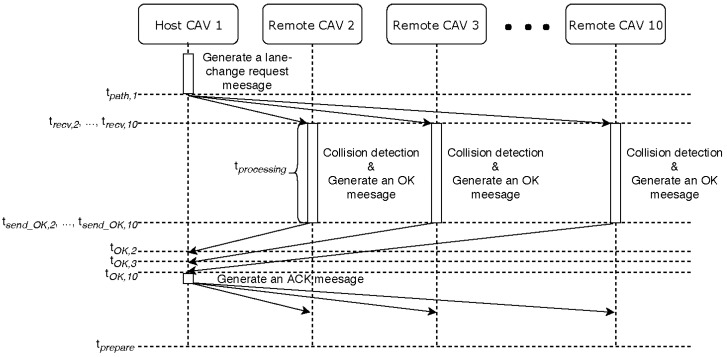
Connected and automated vehicles (CAVs) have recently attracted a great deal of attention. Various studies have been conducted to improve vehicle and traffic safety through vehicle to vehicle (V2V) communication. In the field of CAVs, lane change research is considered a very challenging subject. This paper presents a cooperative lane change protocol, considering the impact of V2V communication delay. When creating a path for a lane change in the local path planning module, V2V communication delay occurs. Each vehicle was represented, in our study, by an oriented bounding box (OBB) to determine the risk of collision. We set up a highway driving simulation environment and verified the improved protocol by implementing a longitudinal and lateral controller.
Keywords: V2V communication sensor; collision detection; connected and automated vehicle (CAV); lane change; path planning.
Conflict of interest statement
The authors declare that there are no conflicts of interest regarding the publication of this paper.
Figures


Similar articles
-
Decentralized Platoon Join-in-Middle Protocol Considering Communication Delay for Connected and Automated Vehicle.Sensors (Basel). 2021 Oct 27;21(21):7126. doi: 10.3390/s21217126. Sensors (Basel). 2021. PMID: 34770433 Free PMC article.
-
Collision-avoidance lane change control method for enhancing safety for connected vehicle platoon in mixed traffic environment.Accid Anal Prev. 2023 May;184:106999. doi: 10.1016/j.aap.2023.106999. Epub 2023 Feb 11. Accid Anal Prev. 2023. PMID: 36780868
-
Impact of cyberattacks on safety and stability of connected and automated vehicle platoons under lane changes.Accid Anal Prev. 2021 Feb;150:105861. doi: 10.1016/j.aap.2020.105861. Epub 2021 Jan 11. Accid Anal Prev. 2021. PMID: 33445034
-
Collaborative Autonomous Driving-A Survey of Solution Approaches and Future Challenges.Sensors (Basel). 2021 May 29;21(11):3783. doi: 10.3390/s21113783. Sensors (Basel). 2021. PMID: 34072603 Free PMC article. Review.
-
Simulation framework for connected vehicles: a scoping review.F1000Res. 2021 Dec 9;10:1265. doi: 10.12688/f1000research.73398.2. eCollection 2021. F1000Res. 2021. PMID: 36852011 Free PMC article. Review.
Cited by
-
Decentralized Platoon Join-in-Middle Protocol Considering Communication Delay for Connected and Automated Vehicle.Sensors (Basel). 2021 Oct 27;21(21):7126. doi: 10.3390/s21217126. Sensors (Basel). 2021. PMID: 34770433 Free PMC article.
-
Numerical Analysis of an Autonomous Emergency Braking System for Rear-End Collisions of Electric Bicycles.Sensors (Basel). 2023 Dec 26;24(1):137. doi: 10.3390/s24010137. Sensors (Basel). 2023. PMID: 38202997 Free PMC article.
-
Conditional Artificial Potential Field-Based Autonomous Vehicle Safety Control with Interference of Lane Changing in Mixed Traffic Scenario.Sensors (Basel). 2019 Sep 27;19(19):4199. doi: 10.3390/s19194199. Sensors (Basel). 2019. PMID: 31569737 Free PMC article.
-
A Cyber-Physical Framework for Optimal Coordination of Connected and Automated Vehicles on Multi-Lane Freeways.Sensors (Basel). 2023 Jan 5;23(2):611. doi: 10.3390/s23020611. Sensors (Basel). 2023. PMID: 36679409 Free PMC article.
References
-
- Khodayari A., Ghaffari A., Ameli S., Flahatgar J. A historical review on lateral and longitudinal control of autonomous vehicle motions; Proceedings of the 2010 International Conference on Mechanical and Electrical Technology (ICMET); Singapore. 10–12 September 2010; pp. 421–429.
-
- Bevly D., Cao X., Gordon M., Ozbilgin G., Kari D., Nelson B., Woodruff J., Barth M., Murray C., Kurt A., et al. Lane change and merge maneuvers for connected and automated vehicles: A survey. IEEE Trans. Intell. Veh. 2016;1:105–120. doi: 10.1109/TIV.2015.2503342. - DOI
-
- Choi J., Va V., Gonzalez-Prelcic N., Daniels R., Bhat C.R., Heath R.W. Millimeter-wave vehicular communication to support massive automotive sensing. IEEE Commun. Mag. 2016;54:160–167. doi: 10.1109/MCOM.2016.1600071CM. - DOI
-
- Hobert L., Festag A., Llatser I., Altomare L., Visintainer F., Kovacs A. Enhancements of V2X communication in support of cooperative autonomous driving. IEEE Commun. Mag. 2015;53:67–70. doi: 10.1109/MCOM.2015.7355568. - DOI
-
- Schlechtriemen J., Wedel A., Hillenbrand J., Breuel G., Kuhnert K.D. A lane change detection approach using feature ranking with maximized predictive power; Proceedings of the 2014 IEEE Intelligent Vehicles Symposium Proceedings; Dearborn, MI, USA. 8–11 June 2014; pp. 108–114.
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
