

Constructing an Indoor Floor Plan Using Crowdsourcing Based on Magnetic Fingerprinting
- PMID: 29156639
- PMCID: PMC5712792
- DOI: 10.3390/s17112678
Constructing an Indoor Floor Plan Using Crowdsourcing Based on Magnetic Fingerprinting
Abstract
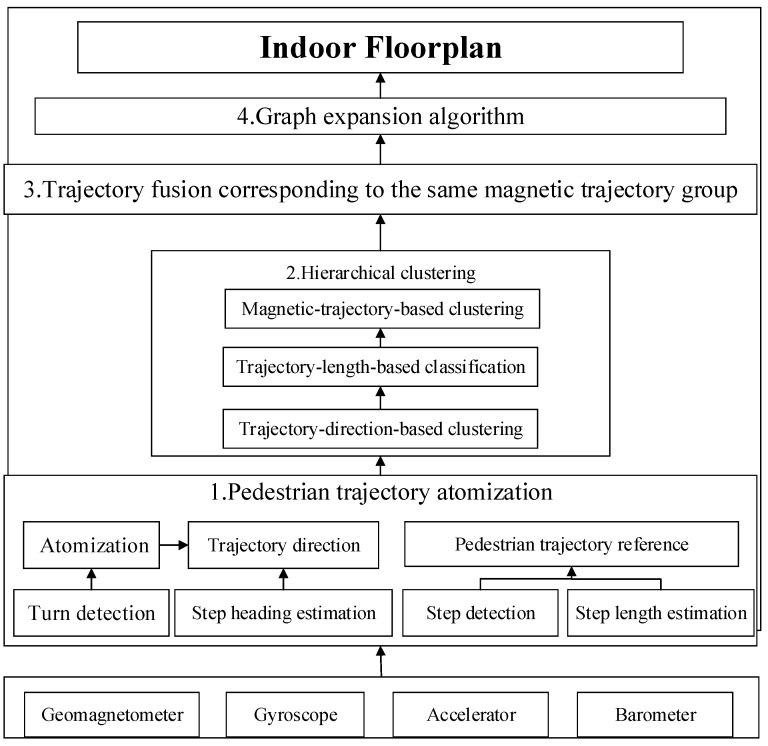
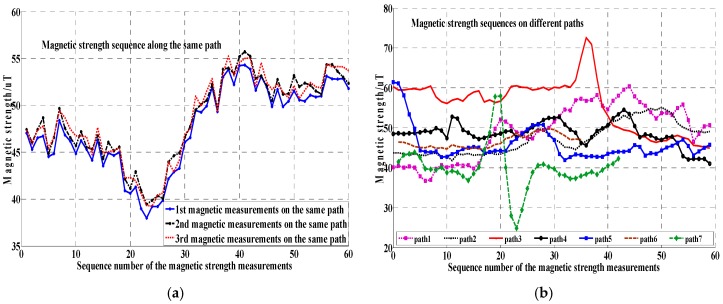
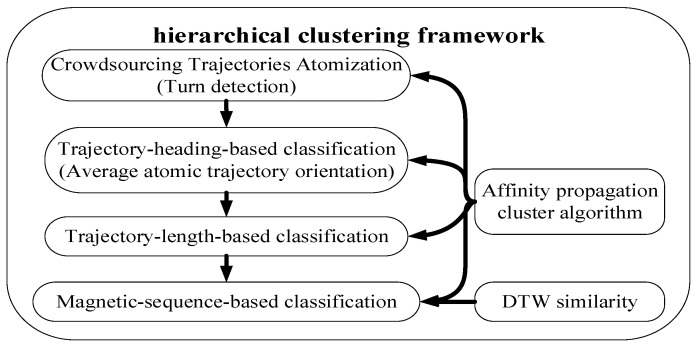
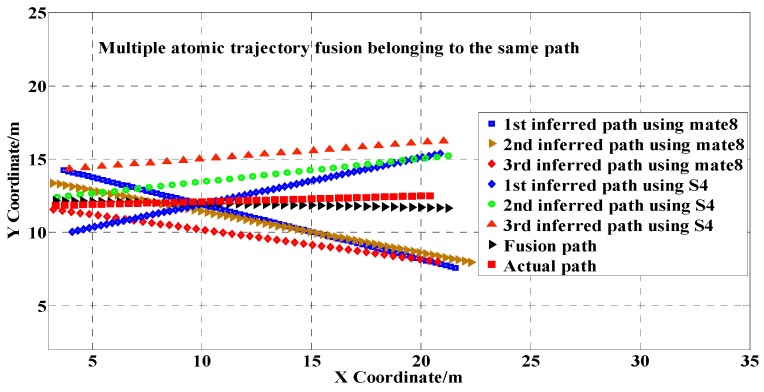
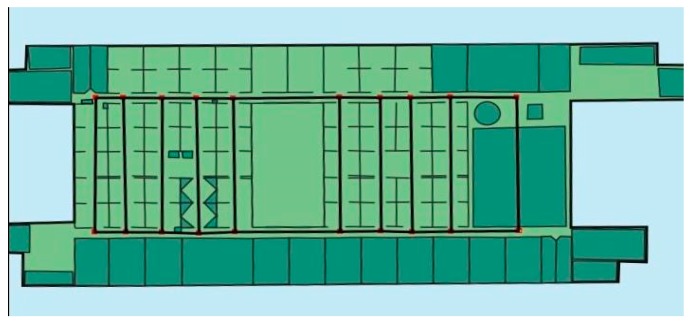
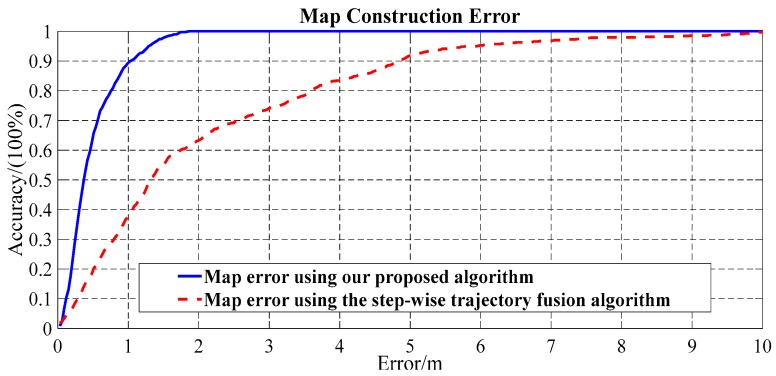
A large number of indoor positioning systems have recently been developed to cater for various location-based services. Indoor maps are a prerequisite of such indoor positioning systems; however, indoor maps are currently non-existent for most indoor environments. Construction of an indoor map by external experts excludes quick deployment and prevents widespread utilization of indoor localization systems. Here, we propose an algorithm for the automatic construction of an indoor floor plan, together with a magnetic fingerprint map of unmapped buildings using crowdsourced smartphone data. For floor plan construction, our system combines the use of dead reckoning technology, an observation model with geomagnetic signals, and trajectory fusion based on an affinity propagation algorithm. To obtain the indoor paths, the magnetic trajectory data obtained through crowdsourcing were first clustered using dynamic time warping similarity criteria. The trajectories were inferred from odometry tracing, and those belonging to the same cluster in the magnetic trajectory domain were then fused. Fusing these data effectively eliminates the inherent tracking errors originating from noisy sensors; as a result, we obtained highly accurate indoor paths. One advantage of our system is that no additional hardware such as a laser rangefinder or wheel encoder is required. Experimental results demonstrate that our proposed algorithm successfully constructs indoor floor plans with 0.48 m accuracy, which could benefit location-based services which lack indoor maps.
Keywords: DTW; affinity propagation clustering; crowdsourcing; floor plan construction; indoor localization.
Conflict of interest statement
The authors declare no conflict of interest.
Figures

Similar articles
-
Fingerprints and Floor Plans Construction for Indoor Localisation Based on Crowdsourcing.Sensors (Basel). 2019 Feb 22;19(4):919. doi: 10.3390/s19040919. Sensors (Basel). 2019. PMID: 30813228 Free PMC article.
-
Geomagnetism-Aided Indoor Wi-Fi Radio-Map Construction via Smartphone Crowdsourcing.Sensors (Basel). 2018 May 8;18(5):1462. doi: 10.3390/s18051462. Sensors (Basel). 2018. PMID: 29738454 Free PMC article.
-
A Robust Crowdsourcing-Based Indoor Localization System.Sensors (Basel). 2017 Apr 14;17(4):864. doi: 10.3390/s17040864. Sensors (Basel). 2017. PMID: 28420108 Free PMC article.
-
A Radio-Map Automatic Construction Algorithm Based on Crowdsourcing.Sensors (Basel). 2016 Apr 9;16(4):504. doi: 10.3390/s16040504. Sensors (Basel). 2016. PMID: 27070623 Free PMC article.
-
Combining a Modified Particle Filter Method and Indoor Magnetic Fingerprint Map to Assist Pedestrian Dead Reckoning for Indoor Positioning and Navigation.Sensors (Basel). 2019 Dec 28;20(1):185. doi: 10.3390/s20010185. Sensors (Basel). 2019. PMID: 31905699 Free PMC article.
Cited by
-
Real-Time Recursive Fingerprint Radio Map Creation Algorithm Combining Wi-Fi and Geomagnetism.Sensors (Basel). 2018 Oct 10;18(10):3390. doi: 10.3390/s18103390. Sensors (Basel). 2018. PMID: 30309033 Free PMC article.
-
A Fast Indoor/Outdoor Transition Detection Algorithm Based on Machine Learning.Sensors (Basel). 2019 Feb 14;19(4):786. doi: 10.3390/s19040786. Sensors (Basel). 2019. PMID: 30769914 Free PMC article.
-
Feasibility Analysis of Magnetic Navigation for Vehicles.Sensors (Basel). 2019 Dec 9;19(24):5410. doi: 10.3390/s19245410. Sensors (Basel). 2019. PMID: 31818041 Free PMC article.
-
DeepIOD: Towards A Context-Aware Indoor-Outdoor Detection Framework Using Smartphone Sensors.Sensors (Basel). 2024 Aug 7;24(16):5125. doi: 10.3390/s24165125. Sensors (Basel). 2024. PMID: 39204822 Free PMC article.
-
The Implication of Pathway Turn and Task Condition on Gait Quantified Using SmartWalk: Changes With Age and Parkinson's Disease With Relevance to Postural Strategy and Risk of Fall.Front Neurosci. 2022 Apr 29;16:804397. doi: 10.3389/fnins.2022.804397. eCollection 2022. Front Neurosci. 2022. PMID: 35573308 Free PMC article.
References
-
- Bahl P., Padmanabhan V.N. Radar: An in-building RF-based User Location and Tracking System; Proceedings of the IEEE INFOCOM 2000; Tel Aviv, Israel. 26–30 March 2000; pp. 775–784.
-
- Youssef M., Agrawala A. The Horus WLAN Location Determination System; Proceedings of the 3rd International Conference on Mobile Systems, Applications, and Services; Seattle, WA, USA. 6–8 June 2005.
-
- Hallberg J., Nilsson M., Synnes K. Positioning with Bluetooth. IEEE ICT. 2003;2:954–958.
-
- Ni L.M., Liu Y., Lau Y.C., Patil A.P. LANDMARC: Indoor Location Sensing Using Active RFID; Proceedings of the First IEEE International Conference on Pervasive Computing and Communications, (PerCom 2003); Fort Worth, TX, USA. 26 March 2003.
-
- Ibrahim M., Youssef M. Cellsense: An Accurate Energy-efficient GSM Positioning System. IEEE Trans. Veh. Technol. 2011;61:286–296. doi: 10.1109/TVT.2011.2173771. - DOI
LinkOut - more resources
Full Text Sources
Other Literature Sources
