

An Improved Indoor Positioning System Using RGB-D Cameras and Wireless Networks for Use in Complex Environments
- PMID: 29053629
- PMCID: PMC5676659
- DOI: 10.3390/s17102391
An Improved Indoor Positioning System Using RGB-D Cameras and Wireless Networks for Use in Complex Environments
Abstract
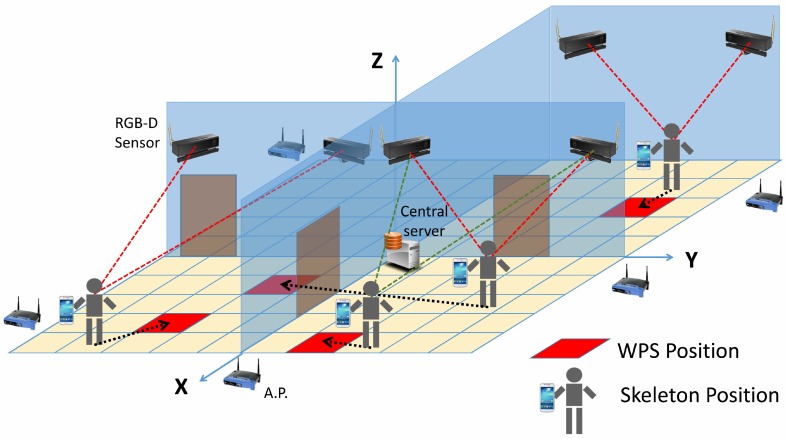
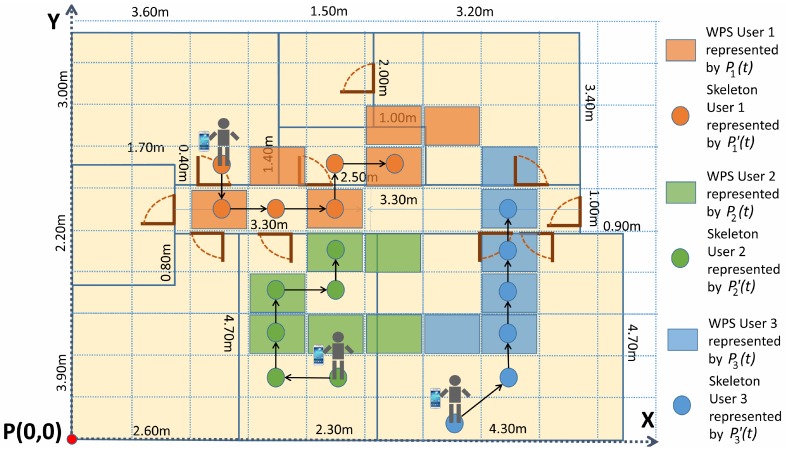
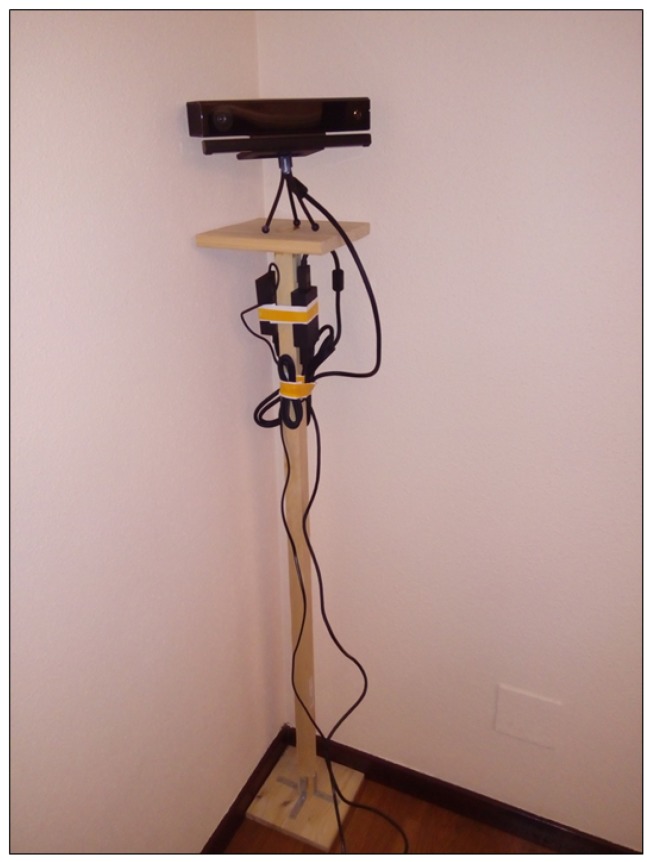
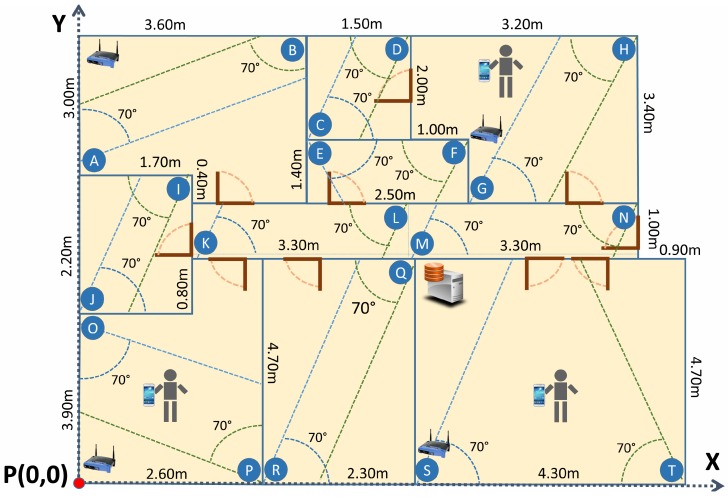
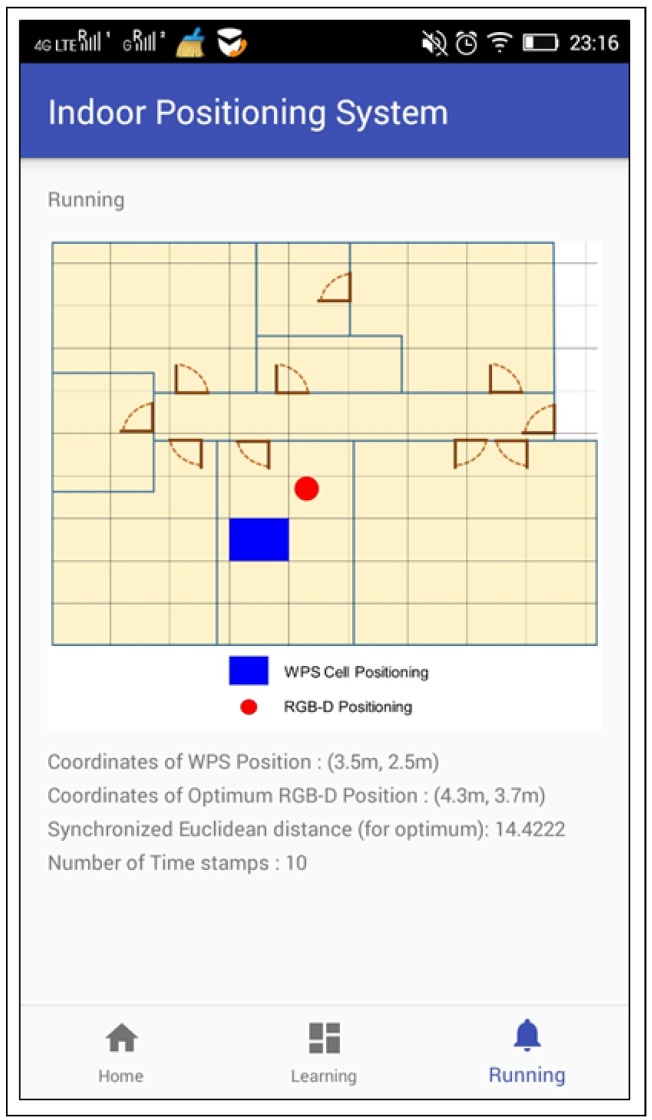
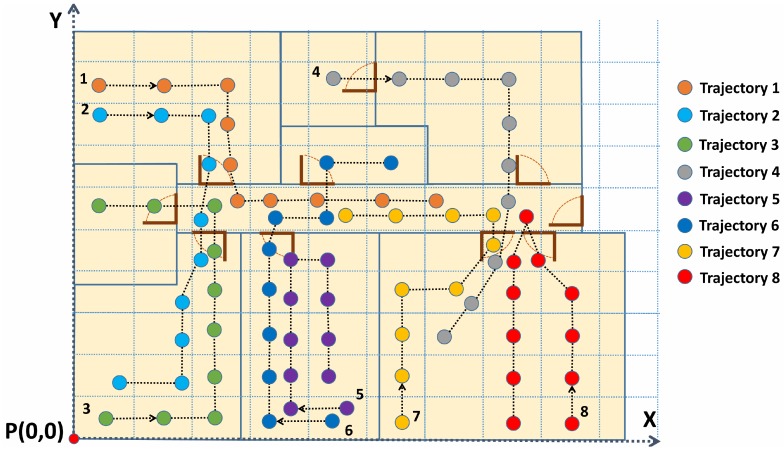
This work presents an Indoor Positioning System to estimate the location of people navigating in complex indoor environments. The developed technique combines WiFi Positioning Systems and depth maps, delivering promising results in complex inhabited environments, consisting of various connected rooms, where people are freely moving. This is a non-intrusive system in which personal information about subjects is not needed and, although RGB-D cameras are installed in the sensing area, users are only required to carry their smart-phones. In this article, the methods developed to combine the above-mentioned technologies and the experiments performed to test the system are detailed. The obtained results show a significant improvement in terms of accuracy and performance with respect to previous WiFi-based solutions as well as an extension in the range of operation.
Keywords: IPS; Kinect; RGB-D sensors; WPS; WiFi; depth map; fingerprinting; indoor positioning; skeletons; trajectory.
Conflict of interest statement
The authors declare that there is no conflict of interest regarding the publication of this manuscript.
Figures
Similar articles
-
Integration of Computer Vision and Wireless Networks to Provide Indoor Positioning.Sensors (Basel). 2019 Dec 12;19(24):5495. doi: 10.3390/s19245495. Sensors (Basel). 2019. PMID: 31842496 Free PMC article.
-
Leveraging Visual Place Recognition to Improve Indoor Positioning with Limited Availability of WiFi Scans.Sensors (Basel). 2019 Aug 22;19(17):3657. doi: 10.3390/s19173657. Sensors (Basel). 2019. PMID: 31443504 Free PMC article.
-
WiFi Based Fingerprinting Positioning Based on Seq2seq Model.Sensors (Basel). 2020 Jul 5;20(13):3767. doi: 10.3390/s20133767. Sensors (Basel). 2020. PMID: 32635617 Free PMC article.
-
A Survey of Smartphone-Based Indoor Positioning System Using RF-Based Wireless Technologies.Sensors (Basel). 2020 Dec 17;20(24):7230. doi: 10.3390/s20247230. Sensors (Basel). 2020. PMID: 33348701 Free PMC article. Review.
-
Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances.Sensors (Basel). 2016 May 16;16(5):707. doi: 10.3390/s16050707. Sensors (Basel). 2016. PMID: 27196906 Free PMC article. Review.
Cited by
-
An Ensemble Filter for Indoor Positioning in a Retail Store Using Bluetooth Low Energy Beacons.Sensors (Basel). 2019 Oct 19;19(20):4550. doi: 10.3390/s19204550. Sensors (Basel). 2019. PMID: 31635097 Free PMC article.
-
Relative Pose Based Redundancy Removal: Collaborative RGB-D Data Transmission in Mobile Visual Sensor Networks.Sensors (Basel). 2018 Jul 26;18(8):2430. doi: 10.3390/s18082430. Sensors (Basel). 2018. PMID: 30049979 Free PMC article.
-
Sensing Framework for the Internet of Actors in the Value Co-Creation Process with a Beacon-Attachable Indoor Positioning System.Sensors (Basel). 2020 Dec 25;21(1):83. doi: 10.3390/s21010083. Sensors (Basel). 2020. PMID: 33375596 Free PMC article.
-
Integration of Computer Vision and Wireless Networks to Provide Indoor Positioning.Sensors (Basel). 2019 Dec 12;19(24):5495. doi: 10.3390/s19245495. Sensors (Basel). 2019. PMID: 31842496 Free PMC article.
-
Multimodal Human and Environmental Sensing for Longitudinal Behavioral Studies in Naturalistic Settings: Framework for Sensor Selection, Deployment, and Management.J Med Internet Res. 2019 Aug 20;21(8):e12832. doi: 10.2196/12832. J Med Internet Res. 2019. PMID: 31432781 Free PMC article.
References
-
- Liu H., Darabi H., Banerjee P., Liu J. Survey of wireless indoor positioning techniques and systems. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2007;37:1067–1080. doi: 10.1109/TSMCC.2007.905750. - DOI
-
- Weerasinghe I.T., Ruwanpura J.Y., Boyd J.E., Habib A.F. Application of Microsoft Kinect sensor for tracking construction workers; Proceedings of the Construction Research Congress; West Lafayette, IN, USA. 21–23 May 2012; pp. 858–867.
-
- Munaro M., Basso F., Menegatti E. OpenPTrack: Open source multi-camera calibration and people tracking for RGB-D camera networks. Robot. Auton. Syst. 2016;75:525–538. doi: 10.1016/j.robot.2015.10.004. - DOI
-
- Saputra M.R.U., Widyawan W., Putra G.D., Santosa P.I. Indoor human tracking application using multiple depth-cameras; Proceedings of the 2012 International Conference on Advanced Computer Science and Information Systems (ICACSIS); Depok, Indonesia. 1–2 December 2012; pp. 307–312.
-
- Nakano Y., Izutsu K., Tajitsu K., Kai K., Tatsumi T. Kinect Positioning System (KPS) and its potential applications; Proceedings of the International Conference on Indoor Positioning and Indoor Navigation; Sydney, Australia. 13–15 November 2012; p. 15.
LinkOut - more resources
Full Text Sources
Other Literature Sources
